
ติดตั้ง VMWare ก่อนแล้วติดตั้ง OS Ubuntu 18.04 LTS ลงบน VMWare จากนั้น Run Ubuntu แล้วเปิด Web Browser พิมพ์ค้นหา SDK Manager แล้วคลิก Link ของ Nvidia Developer

เลื่อนลงมาด้านล่างไปที่ Visit SDK Manager Downloads Archive for older versions

เลือก Download SDK Manager เวอร์ชัน 1.9.3

เลือก Save File แล้วคลิก OK

จะได้ไฟล์ sdkmanager_1.9.3-amd64.deb มา

ดับเบิ้ลคลิกที่ไฟล์เพื่อติดตั้ง SDK Manager

หลังจากติดตั้งสำเร็จ เปิด Terminal แล้วพิมพ์คำสั่ง sdkmanager เพื่อเปิดซอฟต์แวร์ขึ้นมา

ทำการ Login ด้วย Nvidia Developer Account (จะต้องทำสมัคร Account ก่อน)

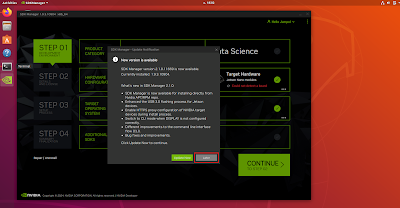
หากมีหน้าต่าง New version is available ขึ้นมา ให้เลือก Later
เสียบสาย USB ระหว่าง Nvidia Jetson Nano ในโหมด Factory Recovery กับคอมพิวเตอร์ SDK Manager จะสามารถ Detect Jetson Nano modules ได้

คลิกเครื่องหมากถูกที่ Host Machine ออก เพราะเราต้องการ Download เฉพาะซอฟต์แวร์ที่จะใช้กับ Nvidia Jetson Nano โดยเลือก Target Operating System เป็น Linux JetPack 4.6.4

คลิกเครื่องหมายถูกที่ Jetson SDK Components ออก เพื่อติดตั้งเฉพาะ OS เท่านั้น

คลิก Accept license agreement จากนั้นคลิก Continue เพื่อเริ่ม Download และติดตั้ง โดยให้กรอก Password ของ OS Ubuntu ที่ใช้อยู่

SDK Manager จะทำการ Download และ Create OS image รอจนครบ 100%


จากนั้นจะเข้าสู่กระบวนการ Flash OS หากเชื่อมต่อ Nvidia Jetson Nano ที่อยู่ในโหมด Factory Recovery ให้เลือกข้อ 1 เป็น Manual Setup แต่ถ้าเชื่อมต่อแบบปกติให้เลือกเป็น Automatic Setup จากนั้นกรอก Username และ Password ของ Nvidia Jetson Nano ที่ต้องการใช้งาน แล้วคลิก Flash


SDK Manager จะทำการ Flash OS ให้กับ Nvidia Jetson Nano รอจนกระทั่ง Flash เสร็จสิ้น

หลังจาก Flash สำเร็จ SDK Manager จะแสดงข้อความ Installation Completed Successfully คลิก Finish and Exit
